MCHP High-Speed Analog Comparator with Slope Compensation Documentation

When to use:
When to use:
- Peak current mode control for DC-DC converters (buck, boost, flyback)
- Duty cycle >50% — slope compensation prevents sub-harmonic oscillation
- Integrated ramp generation needed (automatic synchronization with PWM)
- Variable slope adjustment required for optimal stability margins
- Multiple comparators with individual slope compensation (up to 8 instances)
When NOT to use:
- Voltage mode control — no slope compensation needed
- Duty cycle always <50% — standard comparator suffices (no oscillation risk)
- Average current mode — different control strategy, no peak compensation
- External slope compensation already implemented in hardware
Overview
The MCHP High-Speed Analog Comparator with Slope Compensation block extends the standard comparator with integrated slope compensation capabilities for peak current mode control applications. This advanced feature prevents sub-harmonic oscillation in current-mode DC-DC converters and motor drives operating at duty cycles above 50%.
All standard comparator features plus slope compensation
Programmable compensation ramp generation
Automatic ramp synchronization with PWM
Variable slope adjustment for optimal stability
Sub-microsecond response for high-frequency switching
Integrated peak current mode control logic
Peak Current Mode Control
Peak current mode control regulates output by controlling the peak inductor current in each switching cycle. Slope compensation stabilizes the control loop when duty cycle exceeds 50%, preventing period-doubling oscillations. Why Slope Compensation? In peak current mode control with D > 50%, the inductor current slope creates a positive feedback loop leading to sub-harmonic oscillation. Adding a compensation ramp to the current sense signal stabilizes the loop.
Typical Applications
- Buck Converters: DC-DC step-down with peak current control
- Boost Converters: DC-DC step-up with current limiting
- Flyback Converters: Isolated power supplies
- Motor Drives: Peak current regulation for torque control
- LED Drivers: Constant current regulation
Block Dialog
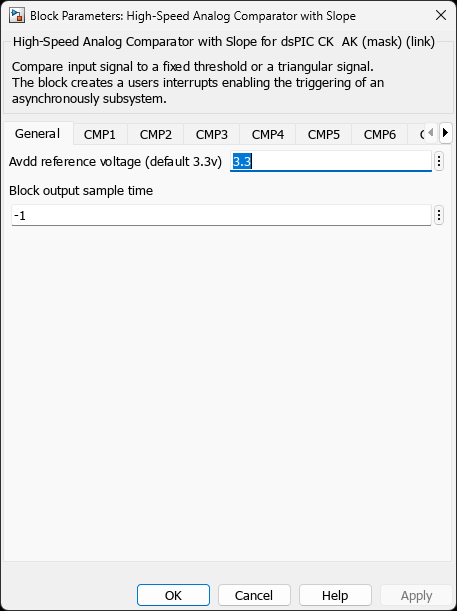
33AK512MPS512Parameters
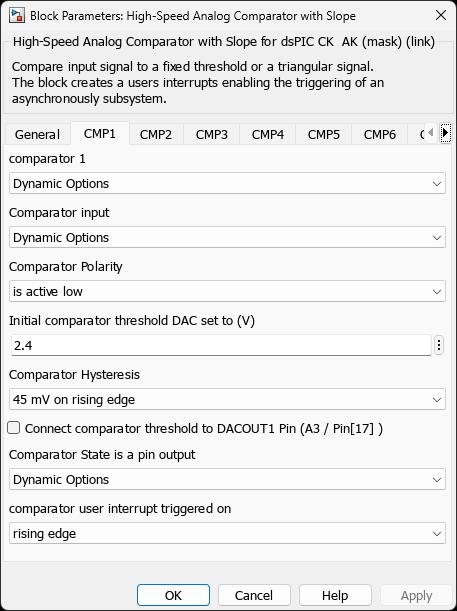
Standard Comparator Configuration
All parameters from the standard High-Speed Analog Comparator block are available, plus the following slope compensation parameters:
Slope Compensation Configuration
| Parameter | Description | Range/Options |
|---|---|---|
| Slope Enable | Enable slope compensation ramp generation | Enabled, Disabled |
| Slope DAC Start Value | Starting value of compensation ramp | 0 to 4095 (12-bit) |
| Slope Rate | Ramp slope in DAC units per PWM period | 0 to 255 |
| Slope Trigger Source | PWM generator for ramp synchronization | PWM1-PWM12 (device-dependent) |
| Slope Polarity | Ramp direction | Positive (rising), Negative (falling) |
Slope Calculation
Slope Compensation Design: 1. Required slope = 0.5 × Inductor current downslope 2. Downslope = (Vout / L) × Tsw 3. Sense voltage slope = Downslope × Rsense 4. DAC slope = (Sense_Slope / Vref) × 4095 × Fsw Example for 100kHz Buck, L=10µH, Vout=12V, Rsense=0.1Ω: - Downslope = (12 / 10µH) × 10µs = 12 A/µs - Sense slope = 12 × 0.1 = 1.2 V/µs - Required comp = 0.5 × 1.2 = 0.6 V/µs - DAC slope = (0.6 / 3.3) × 4095 × 100kHz = 74 units/period
Practical Examples
Example 1: Buck Converter Peak Current Mode
Objective:
Implement 100kHz buck converter (24V→12V, 5A max) with peak current mode control and slope compensation.
Hardware:
- Input voltage: 24V
- Output voltage: 12V (D = 50%)
- Switching frequency: 100kHz
- Inductor: 22µH
- Current sense: 0.05Ω (Rsense)
- Max current: 5A (250mV sense voltage)
Configuration:
- Comparator 1 Enable: on
- Comparator 1 Pin: AN0 (current sense input)
- Reference: Internal DAC (current setpoint)
- CMREF: Dynamic (from voltage loop controller)
- Slope Enable: Enabled
- Slope Start Value: 0
- Slope Rate: 62 (calculated below)
- Slope Trigger: PWM1 (main converter PWM)
- Slope Polarity: Positive (rising)
Slope Calculation:
// Buck downslope: m_down = (Vin - Vout) / L = (24 - 12) / 22µH = 0.545 A/µs // Sense voltage downslope: V_down = m_down × Rsense = 0.545 × 0.05 = 27.3 mV/µs // Required compensation (50% of downslope): V_comp = 0.5 × V_down = 13.65 mV/µs // At 100kHz (10µs period): V_comp_period = 13.65 × 10 = 136.5 mV per period // DAC units per period (Vref = 3.3V): Slope_Rate = (136.5mV / 3.3V) × 4095 = 169 units/period // Practical value (accounting for circuit delays): Slope_Rate = 62 (empirically tuned)
Results:
- Stable operation at all duty cycles (0-95%)
- No sub-harmonic oscillation
- Fast transient response (< 3 switching cycles)
- Accurate current regulation (±2% error)
Example 2: Flyback Converter with Discontinuous Mode
Objective:
Design 50kHz flyback converter (12V→48V isolated) with peak current control in discontinuous conduction mode (DCM).
Specifications:
- Input: 9-15V (12V nominal)
- Output: 48V @ 1A (48W)
- Flyback transformer: Lp=100µH, n=1:4
- DCM operation (inductor current reaches zero)
- Current sense: 0.1Ω primary side
Configuration:
- Comparator 2 Enable: on
- Comparator 2 Pin: AN1 (primary current sense)
- Reference: Internal DAC
- CMREF: From outer voltage loop (typically 1.5-2.0V)
- Slope Enable: Enabled (critical for DCM stability)
- Slope Start Value: 100 (offset for DCM)
- Slope Rate: 85
- Slope Trigger: PWM2
- HYSSEL: 15mV (noise immunity)
DCM Slope Compensation:
// DCM requires different compensation approach: // Peak current varies with input voltage // Slope compensation stabilizes against input variations // Primary current ramp-up slope: m_up = Vin / Lp = 12V / 100µH = 0.12 A/µs = 12 mV/µs (at Rsense=0.1Ω) // DCM compensation (0.5-0.75 × upslope): V_comp = 0.6 × 12 = 7.2 mV/µs // At 50kHz (20µs period): V_comp_period = 7.2 × 20 = 144 mV // DAC slope: Slope_Rate = (144mV / 3.3V) × 4095 = 179 → Use 85 (tuned) // Start value offsets ramp for DCM detection Slope_Start = 100 // Prevents false triggers at DCM start
Example 3: Interleaved Buck with Multiple Phases
Objective:
2-phase interleaved buck converter with independent slope compensation for each phase.
System:
- Input: 48V
- Output: 12V @ 20A (10A per phase)
- Frequency: 200kHz per phase (400kHz effective)
- Phase shift: 180°
- Inductors: 4.7µH per phase
Phase 1 Configuration:
- Comparator 1: Phase 1 current sense (AN0)
- Slope Trigger: PWM1
- Slope Rate: 145
Phase 2 Configuration:
- Comparator 2: Phase 2 current sense (AN1)
- Slope Trigger: PWM2 (180° phase shifted)
- Slope Rate: 145 (matched to Phase 1)
Interleaving Benefits:
// Interleaved advantages: // 1. Reduced input/output ripple (400kHz effective) // 2. Lower per-phase current stress (10A vs 20A) // 3. Better thermal distribution // 4. Smaller passive components // Slope compensation per phase: m_down = (48 - 12) / 4.7µH = 7.66 A/µs V_comp = 0.5 × 7.66 × 0.025Ω = 95.7 mV/µs Slope_Rate = (95.7mV × 5µs / 3.3V) × 4095 = 145 // Phase synchronization ensures: // - Independent current control per phase // - Automatic current sharing // - Fault protection per phase
Example 4: LED Driver with Current Regulation
Objective:
High-brightness LED driver with peak current mode control and dimming support.
Specifications:
- LED string: 10 LEDs × 3.3V = 33V forward voltage
- LED current: 1A constant
- Input: 12-42V automotive
- Boost topology with current feedback
- PWM dimming: 1kHz
Configuration:
- Comparator 3 Enable: on
- Comparator 3 Pin: AN2 (LED current sense)
- Reference: 1.0V (for 1A @ 1Ω sense)
- Slope Enable: Enabled
- Slope Rate: 55 (for 150kHz switching)
- Dimming: AND gate with 1kHz PWM signal
Current Regulation:
// Peak current mode for LED driver: // 1. Comparator trips at peak inductor current // 2. Slope compensation prevents oscillation // 3. Average current = Peak - (ΔI/2) // For 1A average LED current: Peak_Current = 1A + (ΔI/2) ΔI = (Vout - Vin) / (L × Fsw) × D // At worst case (Vin = 12V, Vout = 36V): ΔI = (36 - 12) / (22µH × 150kHz) × 0.67 = 0.48A Peak_Current = 1A + 0.24A = 1.24A // Comparator reference for 1.24A peak: CMREF = 1.24V @ 1Ω sense resistor // Dimming implementation: // Comparator output AND 1kHz PWM → Drive MOSFET // Result: Regulated 1A during ON time, 0A during OFF
Slope Compensation Theory
Sub-Harmonic Oscillation Prevention
Understanding why slope compensation is necessary: Without Slope Compensation (D > 50%): - Cycle N: Current peak = Ipeak - Perturbation causes small increase → Ipeak + ΔI - Duty cycle increases to maintain voltage - Cycle N+1: Peak becomes Ipeak + 2×ΔI - Oscillation grows exponentially → System unstable With Slope Compensation: - Compensation ramp added to current sense - Effective downslope increased - Perturbations decay instead of grow - System stable at all duty cycles
Optimal Slope Selection
| Compensation Level | Stability | Dynamic Response | Recommendation |
|---|---|---|---|
| < | 0.5 × Downslope | Marginal | Fast |
| 0.5 × Downslope | Good | Good | Minimum for stability |
| 1.0 × Downslope | Excellent | Slower | Optimal compromise |
| > 1.5 × Downslope | Excellent | Very slow | Over-compensated |
Device Support
dsPIC33EP
With Slope DAC
dsPIC33EV
With Slope DAC
dsPIC33CK
With Slope DAC
dsPIC33CH
With Slope DAC
Troubleshooting
Common Issues and Solutions
| Issue | Possible Cause | Solution |
|---|---|---|
| Sub-harmonic oscillation at D>50% | Insufficient slope compensation | Increase Slope Rate to 0.75-1.0× downslope |
| Slow transient response | Excessive slope compensation | Reduce Slope Rate, ensure not > 1.5× downslope |
| Ramp not synchronized with PWM | Wrong slope trigger source | Verify Slope Trigger matches PWM generator |
| Current limit varies with duty cycle | Slope polarity incorrect | Check Slope Polarity matches current sense |
| Unstable at light load | Slope start value too high | Reduce Slope Start Value or add DCM detection |
Measurement and Tuning
Oscilloscope Setup for Tuning:
- CH1: Current sense signal (before comparator)
- CH2: Comparator output (trip signal)
- CH3: PWM output (gate drive)
- CH4: Output voltage or current
- Trigger: PWM rising edge
- Look for: Consistent peak current, no period doubling
References
Application Notes:
AN2743 - Peak Current Mode Control with Slope Compensation
AN1106 - Current Mode Control for DC-DC Converters
AN1467 - Interleaved Buck Converter Design
Theory:
“Slope Compensation for Current Mode Control” - Unitrode (TI)
“Stability Analysis of Peak Current Mode Control” - IEEE Papers
Design Tools: MCHP Power Supply Designer (slope compensation calculator)
AN2743 - Sensored Field-Oriented Control of Three-Phase Permanent Magnet Motors
Related Blocks
- MCHP High-Speed Analog Comparator - Basic comparator without slope compensation
- MCHP PWM High-Speed - PWM generator for synchronization
- MCHP Operational Amplifier - Current sense amplification
- MCHP Programmable Gain Amplifier - Variable gain current sensing